器人升降裝置
【申請(qǐng)公布號(hào):CN108002308A;申請(qǐng)權(quán)利人:廣州松興電氣股份有限公司;發(fā)明設(shè)計(jì)人:朱方勇; 顏劍航; 鄧志兵; 張東橋;】
摘要:
機(jī)器人升降裝置,包括基座動(dòng)力部分、傳動(dòng)部分和舉升部分。所述舉升部分為被升降物支撐平臺(tái),舉升部分支撐是通過(guò)絲桿軸支撐與傳動(dòng)部分絲桿固定相連,而另一側(cè)通過(guò)滑軌與基座動(dòng)力部分滑動(dòng)連接;所述傳動(dòng)部分設(shè)有軸承固定座和軸承旋轉(zhuǎn)座,通過(guò)軸承與基座部分轉(zhuǎn)動(dòng)連接,而另一端則通過(guò)同步帶、同步帶輪傳遞與基座部分電機(jī)側(cè)傳輸動(dòng)力。電機(jī)通過(guò)伺服控制器編碼控制電機(jī)轉(zhuǎn)動(dòng),驅(qū)動(dòng)升降機(jī)構(gòu)裝置通過(guò)同步帶、同步帶輪傳遞運(yùn)動(dòng),使舉升部分通過(guò)滑塊滑動(dòng)位移到達(dá)制定精準(zhǔn)工作位置。升降機(jī)構(gòu)裝置,其升降或停止位置是通過(guò)伺服控器編碼控制電機(jī)轉(zhuǎn)動(dòng),從而使舉升部分通過(guò)一定位移量,解決升降位置及升降點(diǎn)位之間位移關(guān)系出現(xiàn)的各種問(wèn)題,得到精準(zhǔn)的升降位置。
主權(quán)項(xiàng):
一種升降機(jī)構(gòu)裝置,包括:基座動(dòng)力部分、傳動(dòng)部分和舉升部分,其特征是所述基座動(dòng)力部分包括固定基座、電機(jī)和主動(dòng)同步輪,并安裝有檢測(cè)開(kāi)關(guān),經(jīng)同步帶與傳動(dòng)部分從動(dòng)同步輪相連接;所述傳動(dòng)部分包括軸承固定座、軸承旋轉(zhuǎn)座、深溝球軸承、推力球軸承以及從動(dòng)同步輪和絲桿,其中軸承固定座固定在固定基座上與軸承旋轉(zhuǎn)座安裝軸承通過(guò)絲桿傳動(dòng)與舉升部分相連接;所述舉升部分包括浮動(dòng)板、浮動(dòng)支撐架、滑軌及安裝檢測(cè)塊,通過(guò)滑軌固定在固定基座上,滑塊運(yùn)動(dòng)形成運(yùn)動(dòng)閉環(huán)升降機(jī)構(gòu)裝置。
要求:
1.一種升降機(jī)構(gòu)裝置,包括:基座動(dòng)力部分、傳動(dòng)部分和舉升部分,其特征是所述基座動(dòng)力部分包括固定基座、電機(jī)和主動(dòng)同步輪,并安裝有檢測(cè)開(kāi)關(guān),經(jīng)同步帶與傳動(dòng)部分從動(dòng)同步輪相連接;所述傳動(dòng)部分包括軸承固定座、軸承旋轉(zhuǎn)座、深溝球軸承、推力球軸承以及從動(dòng)同步輪和絲桿,其中軸承固定座固定在固定基座上與軸承旋轉(zhuǎn)座安裝軸承通過(guò)絲桿傳動(dòng)與舉升部分相連接;所述舉升部分包括浮動(dòng)板、浮動(dòng)支撐架、滑軌及安裝檢測(cè)塊,通過(guò)滑軌固定在固定基座上,滑塊運(yùn)動(dòng)形成運(yùn)動(dòng)閉環(huán)升降機(jī)構(gòu)裝置。
2.根據(jù)權(quán)利要求1所述的升降機(jī)構(gòu)裝置,其特征是基座動(dòng)力部分電機(jī)通過(guò)同步帶傳動(dòng)到達(dá)傳動(dòng)部分,升降動(dòng)作,電機(jī)通過(guò)伺服控制器編碼控制電機(jī)轉(zhuǎn)動(dòng),驅(qū)動(dòng)升降機(jī)構(gòu)裝置通過(guò)同步帶、同步輪傳遞運(yùn)動(dòng),使舉升部分通過(guò)滑塊滑動(dòng)位移到達(dá)制定精準(zhǔn)工作位置。
3.根據(jù)權(quán)利要求1所述的升降機(jī)構(gòu)裝置,其特征是所述為同步帶傳動(dòng)結(jié)構(gòu),采用齒輪傳動(dòng)結(jié)構(gòu)形式,相關(guān)改動(dòng)的結(jié)構(gòu)零件由主動(dòng)同步輪變更為主動(dòng)端齒輪,從動(dòng)同步輪變更為從動(dòng)齒輪,撤銷同步帶。
4.根據(jù)權(quán)利要求1所述的升降機(jī)構(gòu)裝置,其特征是所述為軸承動(dòng)結(jié)構(gòu)形式,為深溝球軸承與推力球軸承組合,或者采用角接觸軸承代替深溝球軸承代替。
5.根據(jù)權(quán)利要求1所述的升降機(jī)構(gòu)裝置,其特征是所述為電機(jī)輸出形式,或者采用伺服電機(jī)或者步進(jìn)電機(jī)代替。
6.根據(jù)權(quán)利要求1所述的升降機(jī)構(gòu)裝置,其特征是所述上限位檢測(cè)形式為檢測(cè)開(kāi)關(guān)檢測(cè),或者采行程開(kāi)關(guān)代替。
7.根據(jù)權(quán)利要求1所述的升降機(jī)構(gòu)裝置,其特征是所述下限位檢測(cè)形式為檢測(cè)開(kāi)關(guān)檢測(cè),或者采行程開(kāi)關(guān)代替。
8.根據(jù)權(quán)利要求1所述的升降機(jī)構(gòu)裝置,其特征是所述機(jī)器人升降裝置升降搭載物包括但不限于:機(jī)器人、視覺(jué)系統(tǒng)、測(cè)量系統(tǒng)等檢查測(cè)量工具。
機(jī)器人升降裝置
技術(shù)領(lǐng)域
本發(fā)明屬于機(jī)械制造技術(shù)領(lǐng)域,適用于軌道車輛檢修統(tǒng)技術(shù),具體是一種機(jī)器人升降裝置。
背景技術(shù)
機(jī)器人升降裝置是軌道車輛檢修小車主要部件之一。升降裝置升降搭載物包括但不限于:機(jī)器人、視覺(jué)系統(tǒng)、測(cè)量系統(tǒng)等檢查測(cè)量工具。軌道車輛檢修小車是視覺(jué)機(jī)器人安裝在專用檢測(cè)小車上,能夠根據(jù)應(yīng)用平臺(tái)通過(guò)無(wú)線網(wǎng)絡(luò)發(fā)送的指令自動(dòng)完成庫(kù)內(nèi)檢修作業(yè),并實(shí)時(shí)發(fā)回檢修進(jìn)度及設(shè)備狀態(tài);而軌道車輛檢修小車上進(jìn)行圖像采集的工具是采用機(jī)器人搭載視覺(jué)測(cè)量,通過(guò)專用小車行走、多點(diǎn)位移動(dòng)工作;機(jī)器人軌跡精準(zhǔn)重復(fù)定位精度可靠。但是由于軌道車輛的車輪在行駛過(guò)程中有一定磨損量,造成被檢測(cè)物多次檢測(cè)的高低不同,所以需要一款能夠自動(dòng)補(bǔ)償由車輪磨損帶來(lái)的檢測(cè)偏差的升降臺(tái)。
發(fā)明內(nèi)容
本發(fā)明的目的在于提供一種升降機(jī)構(gòu)裝置,以解決上述背景技術(shù)中提出的問(wèn)題。
本發(fā)明的技術(shù)方案:
升降機(jī)構(gòu)裝置,包括:基座動(dòng)力部分、傳動(dòng)部分和舉升部分。所述基座動(dòng)力部分包括固定基座、電機(jī)和主動(dòng)同步輪,并安裝有檢測(cè)開(kāi)關(guān),經(jīng)同步帶與傳動(dòng)部分從動(dòng)同步輪相連接;所述傳動(dòng)部分包括軸承固定座、軸承旋轉(zhuǎn)座、深溝球軸承、推力球軸承以及從動(dòng)同步輪和絲桿,其中軸承固定座固定在固定基座上與軸承旋轉(zhuǎn)座安裝軸承通過(guò)絲桿傳動(dòng)與舉升部分相連接;所述舉升部分包括浮動(dòng)板、浮動(dòng)支撐架、滑軌及安裝檢測(cè)塊,通過(guò)滑軌固定在固定基座上,滑塊運(yùn)動(dòng)形成運(yùn)動(dòng)閉環(huán)升降機(jī)構(gòu)裝置。
所述基座動(dòng)力部分電機(jī)通過(guò)同步帶傳動(dòng)到達(dá)傳動(dòng)部分,升降動(dòng)作,電機(jī)通過(guò)伺服控制器編碼控制電機(jī)轉(zhuǎn)動(dòng),驅(qū)動(dòng)升降機(jī)構(gòu)裝置通過(guò)同步帶、同步輪傳遞運(yùn)動(dòng),使舉升部分通過(guò)滑塊滑動(dòng)位移到達(dá)制定精準(zhǔn)工作位置。
作為本發(fā)明再進(jìn)一步的方案:所述為同步帶傳動(dòng)結(jié)構(gòu),采用齒輪傳動(dòng)結(jié)構(gòu)形式,相關(guān)改動(dòng)的結(jié)構(gòu)零件由主動(dòng)同步輪變更為主動(dòng)端齒輪,從動(dòng)同步輪變更為從動(dòng)齒輪,撤銷同步帶;
作為本發(fā)明再進(jìn)一步的方案:所述為軸承動(dòng)結(jié)構(gòu)形式,為深溝球軸承與推力球軸承組合,或者采用角接觸軸承代替深溝球軸承代替;
作為本發(fā)明再進(jìn)一步的方案:所述為電機(jī)輸出形式,或者采用伺服電機(jī)或者步進(jìn)電機(jī)代替;
作為本發(fā)明再進(jìn)一步的方案:所述上限位檢測(cè)形式為檢測(cè)開(kāi)關(guān)檢測(cè),或者采行程開(kāi)關(guān)代替;
作為本發(fā)明再進(jìn)一步的方案:所述下限位檢測(cè)形式為檢測(cè)開(kāi)關(guān)檢測(cè),或者采行程開(kāi)關(guān)代替。
所述機(jī)器人升降裝置升降搭載物包括但不限于:機(jī)器人、視覺(jué)系統(tǒng)、測(cè)量系統(tǒng)等檢查測(cè)量工具。
與現(xiàn)有技術(shù)相比,本發(fā)明的有益效果是:升降機(jī)構(gòu)裝置是電機(jī)通過(guò)伺服控制器編碼控制電機(jī)轉(zhuǎn)動(dòng),驅(qū)動(dòng)升降機(jī)構(gòu)裝置通過(guò)同步帶、同步輪傳遞運(yùn)動(dòng),使舉升部分通過(guò)滑塊滑動(dòng)位移到達(dá)制定精準(zhǔn)工作位置。從而解決升降定位點(diǎn)單一,或者多點(diǎn)位之間位置關(guān)系存在偏差,很難對(duì)數(shù)據(jù)采集或?qū)Ρ忍峁┯辛σ罁?jù)等問(wèn)題。因此本發(fā)明的通過(guò)改進(jìn)結(jié)構(gòu),有效地克服已有技術(shù)之不足。
本發(fā)明結(jié)構(gòu)簡(jiǎn)單,采用同步輪同步帶傳動(dòng),以及絲桿傳動(dòng)方法,通過(guò)通過(guò)伺服控制器編碼控制電機(jī)轉(zhuǎn)動(dòng),使舉升部分位移到達(dá)多個(gè)精準(zhǔn)工作位置,從而解決實(shí)際運(yùn)用中需要實(shí)現(xiàn)多點(diǎn)位數(shù)據(jù)采集或?qū)Ρ确治鎏峁└鼫?zhǔn)確依據(jù)。
附圖說(shuō)明
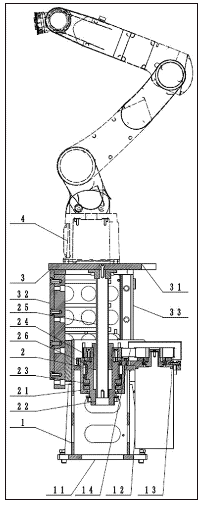
圖1為升降機(jī)構(gòu)裝置的結(jié)構(gòu)各部分示意圖;
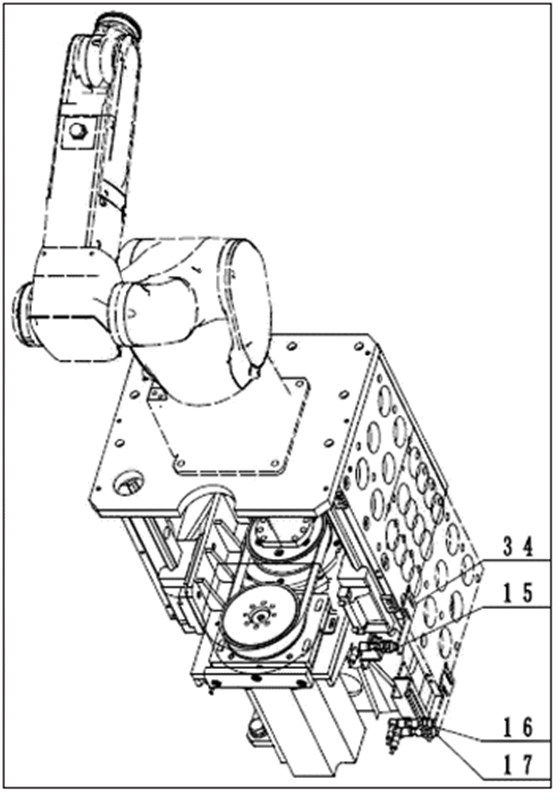
圖2為升降機(jī)構(gòu)裝置的結(jié)構(gòu)示意圖;
圖示:1基座動(dòng)力部分,11固定基座,12電機(jī),13主動(dòng)同步輪,14同步帶,15上限位檢測(cè)開(kāi)關(guān),16原點(diǎn)檢測(cè)開(kāi)關(guān),17下限位檢測(cè)開(kāi)關(guān),2傳動(dòng)部分,21軸承固定座,22軸承旋轉(zhuǎn)座,23推力球軸承,24從動(dòng)同步輪,25絲杠,26深溝球軸承,3舉升部分,31浮動(dòng)板,32浮動(dòng)支撐架,33滑軌,34檢測(cè)塊,4機(jī)器人。
具體實(shí)施方式
下面將結(jié)合本發(fā)明實(shí)施例中的附圖,對(duì)本發(fā)明實(shí)施例中的技術(shù)方案進(jìn)行清楚、完整地描述,顯然,所描述的實(shí)施例僅僅是本發(fā)明一部分實(shí)施例,而不是全部的實(shí)施例。基于本發(fā)明中的實(shí)施例,本領(lǐng)域普通技術(shù)人員在沒(méi)有做出創(chuàng)造性勞動(dòng)前提下所獲得的所有其他實(shí)施例,都屬于本發(fā)明保護(hù)的范圍。
請(qǐng)參閱附圖1,本發(fā)明實(shí)施例中,一種升降機(jī)構(gòu)裝置,這種升降機(jī)構(gòu)裝置,包括1基座動(dòng)力部分、2傳動(dòng)部分和3舉升部分。具體位置結(jié)構(gòu)請(qǐng)參閱附圖2。
所述1、基座動(dòng)力部分包括:11固定基座,12電機(jī),13主動(dòng)同步輪,14同步帶,15上限位檢測(cè)開(kāi)關(guān),16原點(diǎn)檢測(cè)開(kāi)關(guān),17下限位檢測(cè)開(kāi)關(guān)。所述11固定基座上固定安裝12電機(jī);所述12電機(jī)通過(guò)鍵連接安裝13主動(dòng)同步輪;所述13主動(dòng)同步輪與14同步帶連接;15上限位檢測(cè)開(kāi)關(guān),16原點(diǎn)檢測(cè)開(kāi)關(guān),17下限位檢測(cè)開(kāi)關(guān)分別按設(shè)點(diǎn)點(diǎn)固定再11固定基座上;
所述2傳動(dòng)部分包括21軸承固定座,22軸承旋轉(zhuǎn)座,23推力球軸承,24從動(dòng)同步輪,25絲杠,26深溝球軸承。所述21軸承固定座固定安裝在所述11基座上;所述22軸承旋轉(zhuǎn)座經(jīng)所述23推力球軸承和26深溝球軸承與所述21軸承固定座連接;所述22軸承旋轉(zhuǎn)座安裝所述24從動(dòng)同步輪以及所述25絲杠的絲杠螺母;所述24從動(dòng)同步輪與所述1、基座動(dòng)力部分所述的14同步帶連接;
所述3舉升部分包括31浮動(dòng)板,32浮動(dòng)支撐架,33滑軌,34檢測(cè)塊。所述31浮動(dòng)板與所述32浮動(dòng)支撐架固定連接;所述31浮動(dòng)板與所述2傳動(dòng)部分所述25絲杠的絲杠端軸支撐相連;所述32浮動(dòng)支撐架與所述33滑軌軌道固定;所述33滑軌滑塊與所述1基座動(dòng)力部分所述的11基座固定連接;所述34檢測(cè)塊安裝在所述32浮動(dòng)支撐架上。
本發(fā)明的工作原理是:首先通過(guò)設(shè)定檢測(cè)開(kāi)關(guān)位置,能實(shí)現(xiàn)首個(gè)點(diǎn)位對(duì)應(yīng),然后通過(guò)伺服控器編碼控制電機(jī)轉(zhuǎn)動(dòng),從而使舉升部分通過(guò)一定位移量,主動(dòng)同步輪經(jīng)由同步帶傳送到從動(dòng)同步輪,從動(dòng)同步輪與絲杠螺母一起運(yùn)動(dòng)實(shí)現(xiàn)絲杠轉(zhuǎn)動(dòng),絲杠舉升、下降帶動(dòng)浮動(dòng)板從而使滑塊運(yùn)動(dòng),實(shí)現(xiàn)舉升機(jī)構(gòu)到達(dá)理想位置。
從上述的工作原理表明,升降機(jī)構(gòu)裝置是通過(guò)電機(jī)編碼控制讀取檢測(cè)開(kāi)關(guān)設(shè)定原點(diǎn)和達(dá)初始位置后,驅(qū)動(dòng)升降機(jī)構(gòu)通過(guò)滑塊運(yùn)動(dòng),使舉升部分位增量移到達(dá)多個(gè)精準(zhǔn)工作位置。從而解決定位點(diǎn)單一,或者多點(diǎn)位之間位置關(guān)系存在偏差,很難對(duì)數(shù)據(jù)采集或?qū)Ρ忍峁┯辛σ罁?jù)等問(wèn)題。因此本發(fā)明的通過(guò)改進(jìn)結(jié)構(gòu),有效地克服已有技術(shù)之不足。
對(duì)于本領(lǐng)域技術(shù)人員而言,顯然本發(fā)明不限于上述示范性實(shí)施例的細(xì)節(jié),而且在不背離本發(fā)明的精神或基本特征的情況下,能夠以其他的具體形式實(shí)現(xiàn)本發(fā)明。因此,無(wú)論從哪一點(diǎn)來(lái)看,均應(yīng)將實(shí)施例看作是示范性的,而且是非限制性的,本發(fā)明的范圍由所附權(quán)利要求而不是上述說(shuō)明限定,因此旨在將落在權(quán)利要求的等同要件的含義和范圍內(nèi)的所有變化囊括在本發(fā)明內(nèi)。不應(yīng)將權(quán)利要求中的任何附圖標(biāo)記視為限制所涉及的權(quán)利要求。
此外,應(yīng)當(dāng)理解,雖然本說(shuō)明書(shū)按照實(shí)施方式加以描述,但并非每個(gè)實(shí)施方式僅包含一個(gè)獨(dú)立的技術(shù)方案,說(shuō)明書(shū)的這種敘述方式僅僅是為清楚起見(jiàn),本領(lǐng)域技術(shù)人員應(yīng)當(dāng)將說(shuō)明書(shū)作為一個(gè)整體,各實(shí)施例中的技術(shù)方案也可以經(jīng)適當(dāng)組合,形成本領(lǐng)域技術(shù)人員可以理解的其他實(shí)施方式。
本文由深圳市合發(fā)齒輪機(jī)械有限公司,合發(fā)齒輪17年只做一件事精密齒輪制造—同步帶輪—同步帶,生產(chǎn)廠家標(biāo)準(zhǔn)件大量庫(kù)存當(dāng)天發(fā)貨價(jià)格優(yōu)質(zhì)保障,集研發(fā).生產(chǎn).服務(wù)一體化,